株式会社 竹中工務店
月の溶岩チューブで稼働する
小型ロボット群のシミュレーション環境を
ゲームエンジンの活用によって開発
株式会社 竹中工務店
技術研究所 未来・先端研究部
【インタビュー 】宮口 幹太 氏、髙井 勇志 氏、北野 信吾 氏
導入企業
1610年の創業以来、建築を専業とし、ランドマークとなる数多くの建築物を手掛け、社会発展の一翼を担ってきました。経営理念の「最良の作品を世に遺し、社会に貢献する」活動は、建築の枠を超えて、豊かで安心な「まちづくり」の総合エンジニアリング企業を目指しています。1953年には東京、大阪に研究室(現在の竹中技術研究所)を設置し、独自の新技術や新工法はもちろん、建築基盤領域に留まらず社会課題に応える技術開発に取り組んできました。オープンイノベーションを積極的に取り入れ、未来を見据えた最先端の技術開発を加速しています。
- 所在地
- 〒270-1395 千葉県印西市大塚1丁目5-1
概要
株式会社竹中工務店 技術研究所は、月で小型ロボット群が自律的に活動して人の活動拠点を構築するための研究開発を進めています。この研究開発を効率的に進めるために不可欠なシミュレーション環境は、Unityを用いて構築されました。
同社は月を想定したシミュレーション環境でAIによる学習の仕組みを確立させることで宇宙開発に貢献し、さらにその成果を社会に役立つ建築技術に応用しようと考えています。
課題
- 未知未到領域で協調活動するロボットの研究・開発のためにAIの学習・検証環境が必要だった
- 複数台のロボットの動きを仮想空間で再現する仕組みの構築に苦労していた
解決策
- 採用実績があって扱いやすいゲームエンジンのUnityをシミュレーション環境に採用
- Unityで現実のロボット群との連携システム構築技術を有するシリコンスタジオに開発を委託
効果
- 仮想空間で複数台のロボットを軽快に動かしてデータ収集や検証ができるように
- 月で自律・協調して活動するロボット群の実現に向けた基礎検討環境を確立
前例のない挑戦の成果をまちづくりに生かす
竹中工務店は創業から400年にわたり、数多くの建築物を手がけ、建設業界と社会の発展に寄与してきました。現在は「まちづくり総合エンジニアリング企業」を目指しており、まちのライフサイクルの企画・計画、建設、維持運営を通じて、まちの価値を高めるとともにサステナブルな社会の実現に貢献しようと取り組んでいます。
70年以上の歴史がある同社技術研究所は、独自の新技術や新工法の開発、研究や試験、外部機関からの受託研究などを行っており、またオープンイノベーションの中核拠点としての役割も担っています。

技術研究所 未来・先端研究部 先端数理グループ 主席研究員 髙井 勇志 氏
髙井氏「まちづくりに必要な研究テーマは、建築構造や地盤以外にも多岐にわたります。例えば、空調設備や植栽、生物多様性のための動植物、脱炭素、デジタルトランスフォーメーション、さらには歴史や健康に関するものなどです。私は情報技術系の大学教員から転身したのですが、ゼネコンが大学に匹敵するほど広範に研究し、多数の博士人材も集結しているとは想像していませんでした」
竹中工務店では、未知なる環境での建築にも挑んできました。
宮口氏「1955年の南極の昭和基地建設においては、観測用施設の計画段階から参画して貢献しました。学者4人でも部材を運んで立てられるようにした研究開発が、わが国初のプレハブ住宅として工業化住宅の礎となりました」
そして同社は現在、目線を宇宙に向けて同様の挑戦を続けています。その具体的なプロジェクトの内容とは、AI技術やロボット技術のさらなる進化によって、ロボットが自ら学習・行動して、人の活動できる拠点を構築する仕組みを実現するというものです。

技術研究所 未来・先端研究部 建設革新グループ 主席研究員 宮口 幹太 氏
宮口氏「月の都市開発というのは人類の大きな目標の1つです。そのための第一歩として、この自ら学習・行動するロボットをまず月の溶岩チューブ内部に展開していきます。宇宙分野での研究開発ではありますが、大型設備検査や資源探査、自然災害といった地球上での応用も期待されており、竹中工務店が手がける建築領域ではコンクリート床やフローリングの検査などでの活用が想定されます。また、過去にJAXA様と共同で行った、自律走行により盛土締固め試験を自動化するロボットの研究開発成果と組み合わせれば、広範な土地の地盤調査に応用できると考えられます」
ロボット群が自律的に順応できる仕組みの実現に向けてシミュレーション環境を開発
このプロジェクトでは、月に小型ロボットと自己展開可能な多面体のコンテナを複数投入し、それらを用いて人類の活動拠点を構築するシナリオを想定しています。その実現のため、次のような仕組みの研究開発を行っています。
まず、小型ロボットが集まり、群を形成して協力しながら環境を探査し、人の活動拠点に適した場所を見つけます。次に玉転がしの要領でコンテナを搬送し、最終的にこのコンテナが自ら展開を行って活動拠点を構築します。このように、人がいなくても自律的に活動して月に拠点を構築できるようなシステムを確立することが、このプロジェクトで目指すものです。

シミュレーター上でコンテナを運ぶ小型ロボット群のイメージ
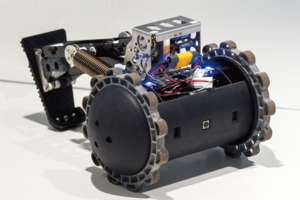
ロボットの実機
髙井氏「探索する月の溶岩チューブはリスクが高い未知未踏の場所です。そのため、高性能ロボットではなく、低コストで単純機能のロボットをたくさん送り込むことにより、その一部が動けなくなったとしても全体としてミッションを遂行できるようにしようという発想が当プロジェクトの基本的な考え方です。ただ、ロボットの数が多く、通信の途絶や遅延も生じるため、地球から人間がコントロールするのではなく、ロボットが自律して活動できるようにする必要があります」
このプロジェクトは複数の領域に分かれており、さまざまな企業や組織が関わっています。その中で竹中工務店では、主にロボットおよびコンテナに関する研究開発のほか、AIなどの技術を駆使しながら複数のロボットが群として自律協調作業を行えるネットワーク知能システムの開発にも関与しています。
北野氏「ロボットを実際の月の溶岩チューブに運んでAIの学習を行うのは難しいため、似た環境であると考えられる富士山麓の溶岩チューブを3Dスキャンし、得られたデータを用いて研究を行っています。ただ、月の重力は6分の1であることなど、条件に違いがあります。そこでこのデータを活用しながら、重力などの違いを加味してシミュレーション環境を構築しました。その中でCADデータから生成したロボットの3Dモデルを動かし、得られたセンサー情報をもとに学習させて、起伏の多い地表をまっすぐ進んだり、障害を自律的によけたりできるようにしています」

技術研究所 未来・先端研究部 建設革新グループ 主任研究員 北野 信吾 氏
宮口氏「ロボット同士が協調して活動できるようにするためにも、シミュレーターが欠かせません。富士山麓の溶岩チューブは想定している月の環境よりも狭いため、数百台のロボットを展開して実験するのは困難です。また、それだけの数の試作を繰り返すのは現実的ではありません。そこで、例えば100台のうち5台は現実のロボット、95台はシミュレーション用の仮想空間上のロボットで群を構成し、互いに情報をやり取りしながら社会性を発現することを目指しています。これが実現すれば、実際に月でロボット100台を展開しても期待通りに探査できると考えられます」
複数台のロボットの協働を軽快に再現するために馴染みがあり使いやすいUnityを採用
そして、このシミュレーション環境を構築するにあたって竹中工務店が注目したのがゲームエンジンです。
髙井氏「ゲームエンジンに特に期待したのは、複数台のロボットが集団でコミュニケーションしながら、仕事を割り振ったり物を運んだりするシミュレーションを軽快に実施できることです。動作が速ければ、それだけ研究開発も速く進められます。自律型ロボットの集団行動は大きなテーマであり難しいところですが、一方で研究としては面白いところでもあります」
ゲームエンジンの中でも、竹中工務店はUnityを選択しました。
北野氏「設計した建物をVRでお客様が確認できるようにするなど、当社ですでに馴染みがあるツールであったことも採用の理由の1つです。しかも言語がC#なのでわかりやすく、研究開発分野では慣れ親しまれていますし、メンテナンスしやすい点も理想的でした。また、コミュニティが大きくてツールが充実しているのも助かります」
一方で、Unityが提供するライブラリも含んだ事前検証を行った結果、課題が浮き彫りになったといいます。
北野氏「実際に手を動かして検証したのですが、仮想空間でロボットを10台、100台と増やして動かすための知見が足りませんでした。また、現実のロボットと仮想空間のロボットを連携させてハイブリッドで動かすためには、そのための作り込みが必要なこともわかりました」
北野氏が必要だと話す作り込みのうち、代表的なものに、映像の転送レートや座標軸系の差異を現実のロボット側に統一するカスタマイズがありました。座標軸系は、一般的にUnityのようなゲームでは左手系、ロボットなどの学術研究では右手系が採用されており、XYZ座標の3軸の値をそのまま行き来させることができないのです。
そこで、このような課題を解決しながらシミュレーション環境を構築できるパートナーとして選定されたのが当社シリコンスタジオでした。
髙井氏「シリコンスタジオは、ゲームエンジンを使った可視化の開発だけでなく、Unityの中身も熟知しており、カスタマイズも可能なところに期待しました」

Unityに関する知見だけでは実現できないロボットとの連携開発をシリコンスタジオがサポート
竹中工務店から委託を受けた当社は、小型ロボット群が月でどのような動きをするかを検証できる、UnityとROS※を連携させたシミュレーターを開発しました。
このシミュレーターは、月と同じ1/6Gの重力環境を再現しています。コントローラーからの操作内容を受信して、現実空間のロボットと同様の動きをUnity上で再現し、センサー情報などをROSメッセージとして送信することが可能です。また、シミュレーターにはAIによる管制システムやロボットの自律行動アルゴリズムも組み込まれています。これにより、AI学習のためにロボット側で行うセンサー情報やカメラによる撮影データの取得、バッテリー充電システム、月の溶岩チューブ内における地図作成の仕組みなどを仮想空間で事前に検証できます。
仮想空間内の溶岩チューブは、富士山麓の溶岩チューブの3次元地形データ(点群およびメッシュデータ)を竹中工務店から受領し、加工してUnityに組み込みました。小型ロボットおよびそれらの電力や通信を補う星型多面体のコンテナは、竹中工務店が設計したCADデータを3Dモデル化してUnityに取り込んだ上、ロボットが移動する動きやコンテナを押して回転させる動きを物理計算し、描画しています。
このシミュレーション環境によって、ロボット単体および複数台の群ロボットとしての動きの検証が可能になりました。さらに、群ロボットによる地図作成の仕組みの検証や「ネットワーク知能」と呼ぶAIの学習データの取得および学習した結果の検証も行うことができます。
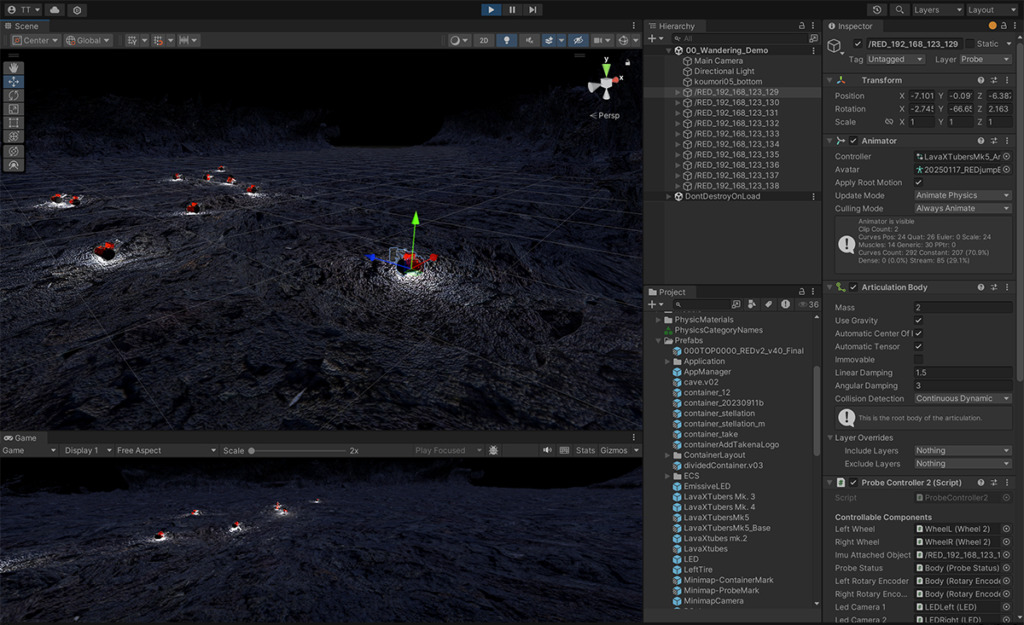
月面の溶岩チューブを再現したシミュレーション環境上で複数のロボットが動作しているイメージ
北野氏「まずは、作りたかったシミュレーション環境を実現できたこと自体が大きな成果です。そして目標としていたロボット単体の動作も仮想空間で確認できています。現在は複数台のロボットが動作し、正しくデータを取得できているかを検証中です。来期以降はロボットの学習や群としての行動に目標が移りますが、そのための基礎を固めることができました」
これまでのシリコンスタジオの実績に対して、竹中工務店ではどのように評価しているのでしょうか。
髙井氏「Unityと連携するロボットプログラムを実現することが不可欠であったため、Unityだけが得意な会社、またはゲームエンジンに知見がないロボットだけが得意な会社では難しかったでしょう。シリコンスタジオはそれらの双方に精通していることでスムーズに開発を進めることができました」
※ROS … ロボットアプリケーションを開発するためのオープンソースのフレームワークとツールセット
社会に未来を提示するためにゲームエンジンの表現力が生きる
このプロジェクトでのシミュレーション環境構築は、プロジェクトに関わる各所からも注目され、成果の共有が非常に期待されているといいます。
髙井氏「シミュレーションの様子をビジュアルでわかりやすく表現できるということも、今回Unityを採用した理由の1つです。シミュレーション環境を構築して研究そのものを加速させるという側面だけではなく、インパクトのある見せ方で成果を表現できるということは大きいですね。宇宙開発という多くのプレイヤーを巻き込まなければならない分野なので、社会に対して価値をうまく伝えることはとても重要です。ロボットのアルゴリズムを書いたプログラムを見てもらっても、一般の人にその成果を伝えることは難しいでしょう」
北野氏「例えばスクリーンに投影してVRゴーグルで見るなど、いろいろなデバイスで簡単に可視化できるのもUnityの大きな特徴だと考えています」
プロジェクトは現在もまだ進行中ですが、今後どのような未来を想像しながら困難を超えて行こうとしているのでしょうか。
宮口氏「最終的には、弊社が開発したロボットが月に行くことが一番の目標です。そして人類の拠点となる“令和基地”の建設に貢献したいですね。さらに、このプロジェクトを通して開発したシミュレーターやロボットの技術を、地上での建設現場や建物の運営など、いろいろな場所で応用できるものにしたいと考えています」
北野氏「Unityは、私たち研究者の手でプログラムをカスタマイズしやすいところが利点の1つではあるものの、どうしても難しいところがあります。それに応えていただけるのがシリコンスタジオでした。今後の研究開発で直面する困難も、技術で突き破ってくれることを期待しています」
シリコンスタジオはゲームエンジンとロボットをつなぐ技術力で、この大きなプロジェクトを引き続き支援し、社会がよりよいものとなるように貢献したいと考えています。