
Sim2Real フィジカルAI シミュレーション基盤
リアルタイム3Dとデジタルツインで加速するフィジカルAI開発基盤
シリコンスタジオは、25年にわたり培ってきたリアルタイム3DCG技術とデジタルツイン開発の知見を活かし、フィジカルAI開発に必要なシミュレーション環境の構築・提供を推進します。
NVIDIA Omniverse、Unity、Unreal Engineなどの3D開発プラットフォームを活用し、現実環境や再現困難な環境を仮想空間に構築。AIの学習・検証から実環境への適用まで、製造業・自動車・ロボティクス領域におけるSim2Realの実現を支えます。
Sim2Realの実現を阻む現実検証と環境再現の課題
フィジカルAIの開発では、現実環境での検証コストや安全性、再現性の低さに加え、月面や宇宙空間のような「実際に容易にアクセスできない環境」や、極端な温度・気圧・災害状況など「現実で再現が困難な環境」の検証が大きな課題となります。実機テストに依存した開発は時間とコストが膨大になり、さらに危険・極限環境の検証不足が、実運用時のリスクや性能不確実性を高める要因となります。
■ 実機検証に依存した開発コストの増大
■ 危険・極限・非現実環境の検証不足
■ 環境再現性の低さによる評価の不安定
■ Sim2Realギャップによる実運用性能低下
フィジカルAI開発を加速するSim2Realシミュレーション基盤の提供
Sim2Real フィジカルAI シミュレーション基盤は、リアルタイム3Dとデジタルツイン技術を活用し、現実環境から月面・宇宙空間などの再現困難な環境まで再構築可能なシミュレーション基盤を提供します。NVIDIA Omniverse、Unity、Unreal Engine などの3D開発プラットフォームを活用し、ロボットや自動化システムの挙動・センサー・環境条件を統合的に再現。Sim2Realにより現実環境へのスムーズな適用と高い再現性を実現します。

フィジカルAI開発を支えるシミュレーション構成要素
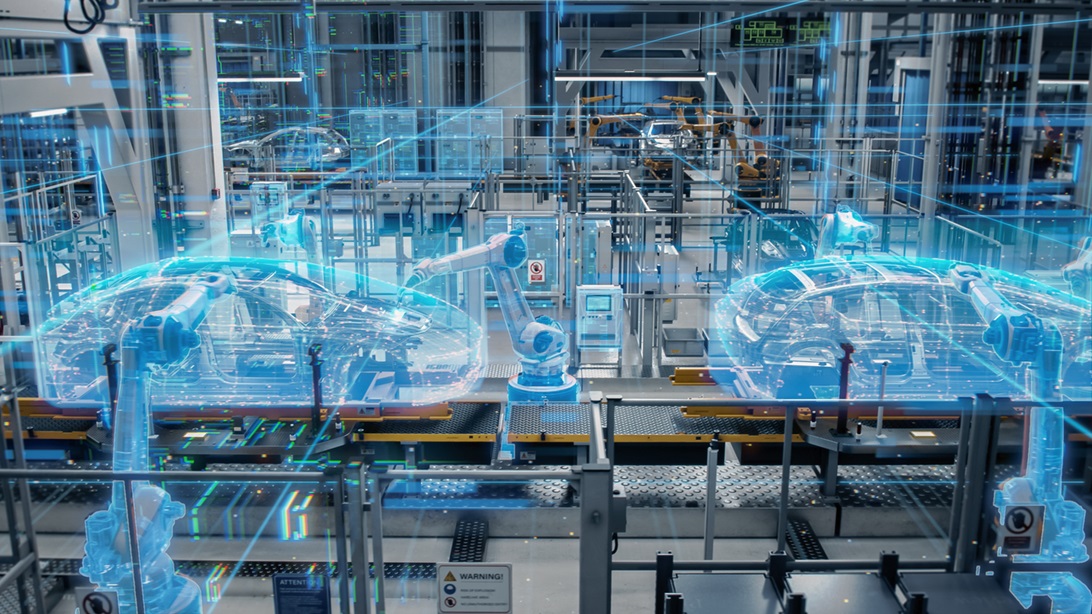
デジタルツイン環境の構築
現実の工場・都市・自然地形に加え、月面や宇宙空間、深海などの特殊環境も3Dグラフィックスで構築し、物理制約を反映した仮想空間として提供します。

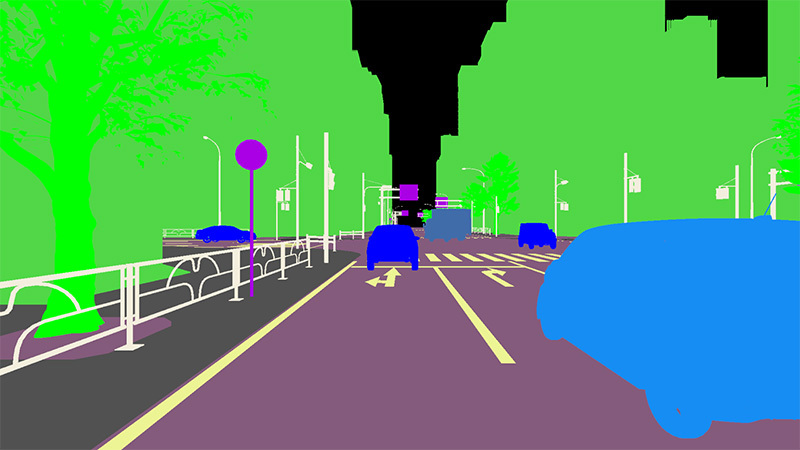
リアルタイム3Dセンサー/環境シミュレーション
カメラ、LiDAR、深度センサーなどからのデータを仮想空間内に再現し、環境そのものを3Dで描画します。ロボットの視覚・計測系を含めた統合的なシミュレーションが可能です。

物理シミュレーションと挙動再現
重力、衝突、摩擦に加え、低重力・無重力環境なども含めた物理挙動を再現し、現実および非現実環境での動作検証を可能にします。
多様なシナリオ設計と再現による網羅的検証
災害、事故、故障、極限環境など多様なシナリオを設計・再現することで、効率的な反復検証による網羅的なテストを実現します。
特徴・強み
デジタルツイン開発で培った高品質描画とパフォーマンス最適化
数々の3Dデジタルツイン案件で培ったノウハウにより、高精細なビジュアル表現と実行環境に応じたパフォーマンス最適化を両立。大規模環境や複雑な条件下においても安定したリアルタイムシミュレーションを実現します。

迅速かつ効率的に構築可能なデジタルツイン×AI開発環境
AIの学習・検証に最適なデジタルツインの構築をスピーディーかつリーズナブルなコスト感で提供。用途や要件に応じて柔軟に構成を最適化し、短期間での立ち上げと拡張性の両立を実現します。
ROSを中心とした実機連携型ロボティクス統合環境
Robot Operating Systemを中心に、シミュレーション環境と実機ロボットを統合し、仮想検証結果をリアルタイムで実機制御へ接続するSim2Realアーキテクチャを構築します。

ベンダーフリーで柔軟に選択できるシミュレーション基盤
特定ベンダーに依存しない設計により、Unity、NVIDIA Omniverse、Unreal Engineなどから連携するシステムやデータ、用途などの要件に応じて最適なプラットフォームを選択。既存資産の活用や将来的な拡張・置き換えにも柔軟に対応します。

ユースケース・活用シーン
建設ロボティクス・自動化施工
建設現場環境を再現し、ロボットの動作や施工プロセスをシミュレーション。安全性と施工効率の検証を実現します。

自律移動ロボット(AMR/AGV)開発
屋内外環境を再現し、ナビゲーションや障害物回避、複数ロボット連携の検証を効率化します。
宇宙・極限環境ロボティクス開発
月面や宇宙空間、極低温・低重力などの環境を再現し、探査ロボットや作業ロボットの動作検証を実施。現実では検証困難な条件下でのAI開発を可能にします。

防災・防衛・海洋分野シミュレーション
災害現場、危険区域、海中環境などを再現し、点検・救助・監視ロボットの検証を実施。高リスク環境での安全性と信頼性向上に貢献します。

導入事例
山岳トンネルデジタルツインプラットフォーム構築
西松建設株式会社
3Dグラフィックスで仮想空間に現場のトンネルを再現。リアルタイムに転送されるROSデータをUnityでデータ変換処理し、3Dモデル化した重機本体およびパーツに反映することで、移動・回転などの動きを再現しました。

月で稼働する小型ロボット群のシミュレーション環境
株式会社 竹中工務店
UnityとROSを連携し、ROSの操作をUnity上で実機同様に再現するシステムを構築。計算結果はROSへ返送されます。月と同じ1/6G重力下で複数の小型ロボット群を同時に軽快に動作させることが可能です。
ロボットの動作試験のためのROS連携シミュレーション
国立大学法人 筑波大学
現実空間に存在するロボットや居室に取り付けられた各種センサーデータのほか、ロボットの動作のモーションキャプチャーデータなどを仮想空間の3Dモデルに反映させる仕組みをNVIDIA Omniverseで構築しました。

Sim2Real フィジカルAI シミュレーション基盤
に関するご相談・お問い合わせ
よくあるご質問と回答
Q. 既存のAI開発環境やロボティクス基盤と連携できますか?
A. はい、連携可能です。Robot Operating System(ROS/ROS2)を中心に、既存のロボティクス制御基盤や機械学習フレームワークと統合できます。シミュレーションで生成したデータや制御ロジックをそのまま実機環境へ接続できるため、既存開発フローを大きく変更することなく導入可能です。
Q. UnityやUnreal Engine、NVIDIA Omniverseなどの3D開発基盤には対応していますか?
A. 対応しています。Unity、Unreal Engine、NVIDIA Omniverseなど複数のリアルタイム3D/デジタルツイン基盤に対応し、用途や要件に応じて最適な環境を選択してご提案します。特定ベンダーに依存しない設計のため、将来的な拡張や置き換えにも柔軟に対応可能です。
Q. 宇宙空間や海洋など、現実では再現が難しい環境にも対応できますか?
A. はい、対応可能です。月面・宇宙空間・低重力環境・海中環境・災害現場など、現実ではアクセスや再現が困難な環境をシミュレーション上で再構築し、ロボットやAIの動作検証を行うことができます。極限環境におけるSim2Real検証に強みを持っています。
Q. 小規模なPoCから導入することは可能ですか?
A. 可能です。特定シナリオや限定環境からPoCを開始し、検証結果に応じて段階的にスケールさせる構成に対応しています。初期投資を抑えながら導入リスクを最小化し、実証を重ねながら本格展開へ移行できます。