- 宇宙・防衛
- 自動車・モビリティ
- 製造・重工
2025.03.11
自動運転や自律制御システムを実現するSLAM。技術と仕組み、活用と課題を解説
- 目次
- この記事を読むのにかかる時間:9分
自動運転や自律制御システムが進化を遂げる中、これらを支えるコア技術として注目されるのがSLAM(スラム)です。SLAMは、自己位置の推定と周囲環境の地図作成を同時に行う技術であり、ロボットやドローン、自動運転車など、幅広い分野で活用が進んでいます。
本記事では、自動運転や自律制御システムを実現する技術「SLAM」について、特徴と機能、自動運転・自律制御での活用、技術的な課題を解説します。

SLAMの基本概念
「SLAM」とは、そもそもどのような概念なのでしょうか。ここでは、SLAMの定義と意味、特徴である自己位置推定と環境地図作成の同時実行、重要性と応用分野についてご紹介します。
SLAMの定義と意味
SLAMとは「Simultaneous Localization and Mapping」の略称で、日本語では「自己位置推定と環境地図作成の同時実行」を意味します。
SLAMの特徴は、自己位置推定と環境地図作成を同時に行うことです。ロボットや車両などの移動体が、未知の環境下において自身の現在位置を推定しながら、同時に周囲の環境の地図を作成します。自動運転車、ドローン、ロボット、AR/VR/MRなど、自律移動システム開発の基盤技術として活用されます。
自己位置推定と環境地図作成の同時実行
自己位置推定には地図が必要であり、地図作成には位置情報が必要なため、これら2つのプロセスは相互に依存しています。
SLAMでは、移動体がカメラやLiDARなどのセンサーで周囲の環境をスキャンし、その情報をもとに移動中の位置変化を計測して現在位置を推定することが可能です。LiDARは高精度な距離情報を取得し、カメラは視覚情報を解析して環境認識を行います。さらにその位置情報を使って環境地図を更新し、より精密な地図を作成します。
これらをリアルタイムで同時実行することにより、移動体は未知の環境でも正確な自己位置推定と地図作成を実現できるのです。
SLAMの重要性と応用分野
SLAMは、GPSに代表される衛生測量システム(GNSS)が利用できなかったり精度が落ちてしまったりする屋内や地下、都市部といった環境で特に効果を発揮する技術です。1980年代から研究が進められ、自動運転車や自律移動ロボット、ドローンなど、さまざまな分野で活用されています。
主な活用事例は、以下のとおりです。
- 自動運転技術:リアルタイムで周囲の環境や障害物を把握し、正確に走行
- 自動ロボット:配膳、清掃、倉庫などのロボットが効率的に作業し、障害物を回避
- ドローン:GPSが使えない環境でも自律飛行を実現
- 建築・エンジニアリング:精密な3次元モデリングやBIMデータの作成で活用
- AR/VR:現実世界と仮想オブジェクトを正確にマッチング
SLAMの技術的仕組み
SLAMは、主に以下の技術によって構成されています。
- センサー技術
- 環境認識と地図生成プロセス
- データ処理アルゴリズム
ここでは、SLAMの技術的な仕組みをご紹介します。
センサー技術
SLAMシステムは、周囲の環境情報を取得するためにさまざまなセンサーを使用します。主なセンサーは、以下のとおりです。
- カメラ:画像データから特徴点を抽出して環境を認識するVisual SLAMで使用。単眼、ステレオ、RGB-Dといった種類があり、低コストだが雨や雪、暗所、光の条件に敏感
- LiDAR(Light Detection and Ranging):レーザー光を使用して高精度な距離測定を広範囲にわたって実施可能。暗所や屋外における霧、塵など厳しい条件下でも安定して動作するが、比較的高価
- 赤外線センサー:可視光とは異なり、暗闇でも使用可能。反応速度が速く動的な障害物への対応が可能だが、高精度な赤外線センサーは高価になる傾向
- ソナー(超音波センサー):音波を使用して距離を測定。水中や濃霧などの環境でも使用可能で比較的安価だが、方向解像度が低く基本的に距離しか測定できないためSLAMの難易度は高い傾向
- GNSS/IMU:衛星測量と加速度センサを組み合わせた位置推定システム。遮蔽物が多い環境を苦手とする衛星測量と累積誤差の影響を受ける加速度センサの欠点を相互に補い、現在位置を推定することが可能
環境認識と地図生成プロセス
SLAMの環境認識と地図生成プロセスは、以下のような手順で行われることが一般的です。
- センサーによるデータ取得:カメラやLiDARなどのセンサーを用いて周囲の環境情報を取得
- 特徴点の抽出:取得したデータから特徴的な点や物体を識別
- データ関連付け:異なる時点で取得したデータ間の対応関係を把握
- 自己位置推定:特徴点の移動から、ロボットの移動量を推定
- 地図更新:推定された現在の位置情報をもとに、環境の地図を更新
- ループ閉じ込み:同じ場所に戻ったことを認識し、累積誤差を修正
このようなプロセスを繰り返し行うことで、SLAMは未知の環境でも自己位置を把握しながら、同時に周囲の地図を作成することが可能です。
データ処理アルゴリズム
センサーから得られたデータを処理して自己位置推定と地図作成を行うためには、効率的なアルゴリズムが不可欠です。
主なアルゴリズムには以下のようなものが挙げられますが、精度と計算効率のトレードオフが不可避のため、用途や環境に応じた選択と最適化が鍵となります。
- EKF-SLAM(Extended Kalman Filter SLAM):初期のアルゴリズムの一つで、不確実性を伴う測定データから位置や速度をできるだけ正確に推定するカルマンフィルターという推定手法を使用。大規模な環境や長期間の使用には向いていない
- Graph-Based SLAM:観測データをグラフ構造で表現し、最適化を通じてロボットの軌跡や地図を推定。観測データがすべて揃った後に計算される非リアルタイムのバッチ処理型のため精度が高く、大規模環境やループ閉じ込みが重要なシナリオで有効
- Particle Filter SLAM:パーティクル(粒子)と呼ばれるロボットの位置の仮説を複数の点群で表現し、その仮説の分布を元にロボットの位置を計算するパーティクルフィルターを用いて複数の位置候補を評価。動きの激しい環境やノイズの多い状況下で有効
- FastSLAM:Particle Filter SLAMの代表的な手法で、ロボットの軌跡推定にはパーティクルフィルターを用い、地図要素(ランドマーク)の推定にはカルマンフィルターなどのパラメトリックな手法を併用。各パーティクルが独立して地図を更新するため、大規模で動的な環境に有効
自動運転におけるSLAMの役割

SLAMを活用することにより、自動運転で実現できることは以下のとおりです。
- 車両の位置特定
- 周辺環境のリアルタイムマッピング
- 障害物検知と回避
ここから、自動運転におけるSLAMの役割をご紹介します。
車両の位置特定
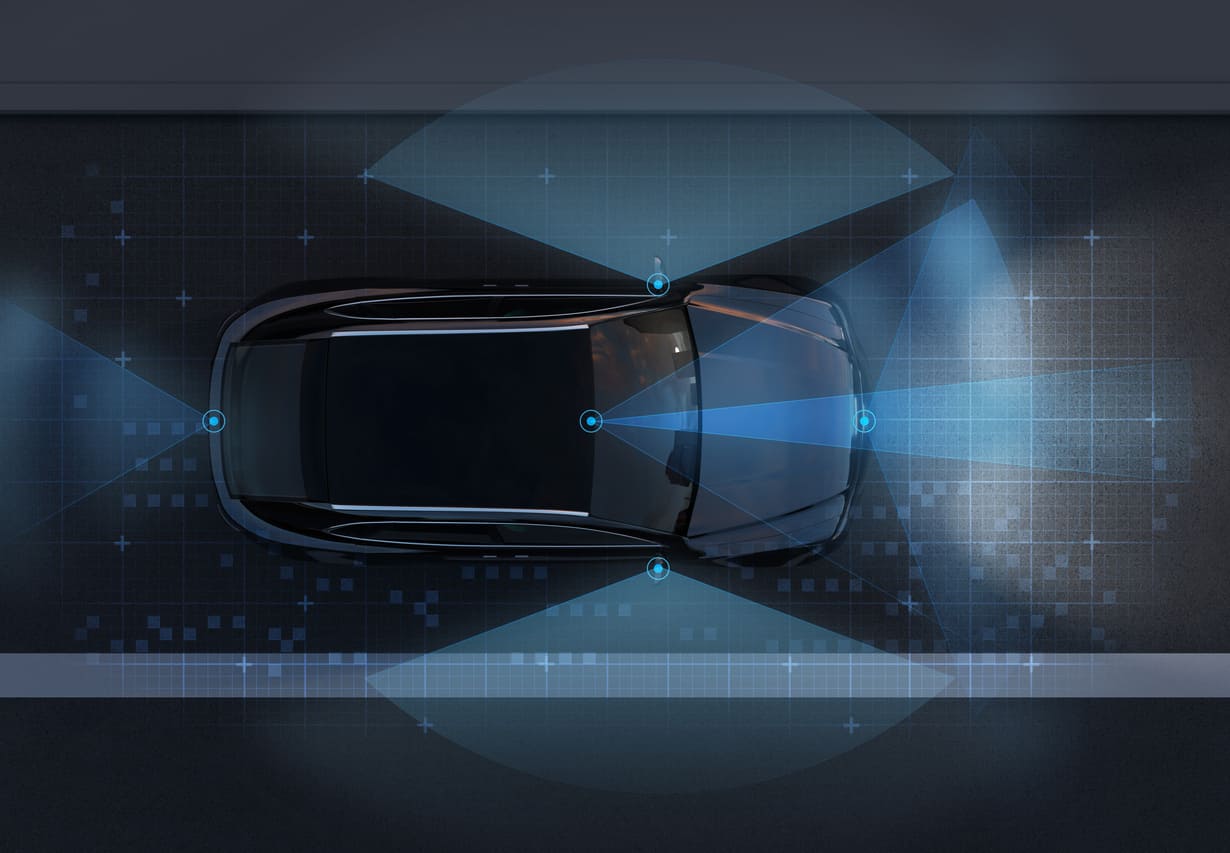
SLAMは、自動運転車両の正確な位置特定に重要な役割を担います。GPSだけでは精度が不十分な場合や、トンネル内などGPS信号が届かない環境でも、SLAMを用いることで車両は現在の位置を高精度に推定することが可能です。
カメラやLiDARなどのセンサーから得られるデータを活用し、周囲の特徴的なランドマークとの相対的な位置関係を計算することで、車両は常に正確な位置を把握できます。
周辺環境のリアルタイムマッピング
リアルタイムマッピングは特に市街地など、動的で複雑な環境での自動運転に不可欠です。
SLAMによるリアルタイムマッピングは、より広範囲な「ダイナミックマップ」と連携することで、自動運転の性能を向上させます。車両のセンサーで得られた最新のデータを、リアルタイムの動的な情報を加えたダイナミックマップに反映させることにより、事前に用意された静的な地図だけでなく、交通規制や道路工事、事故などによる一時的な環境の変化にも対応することが可能です。
障害物検知と回避
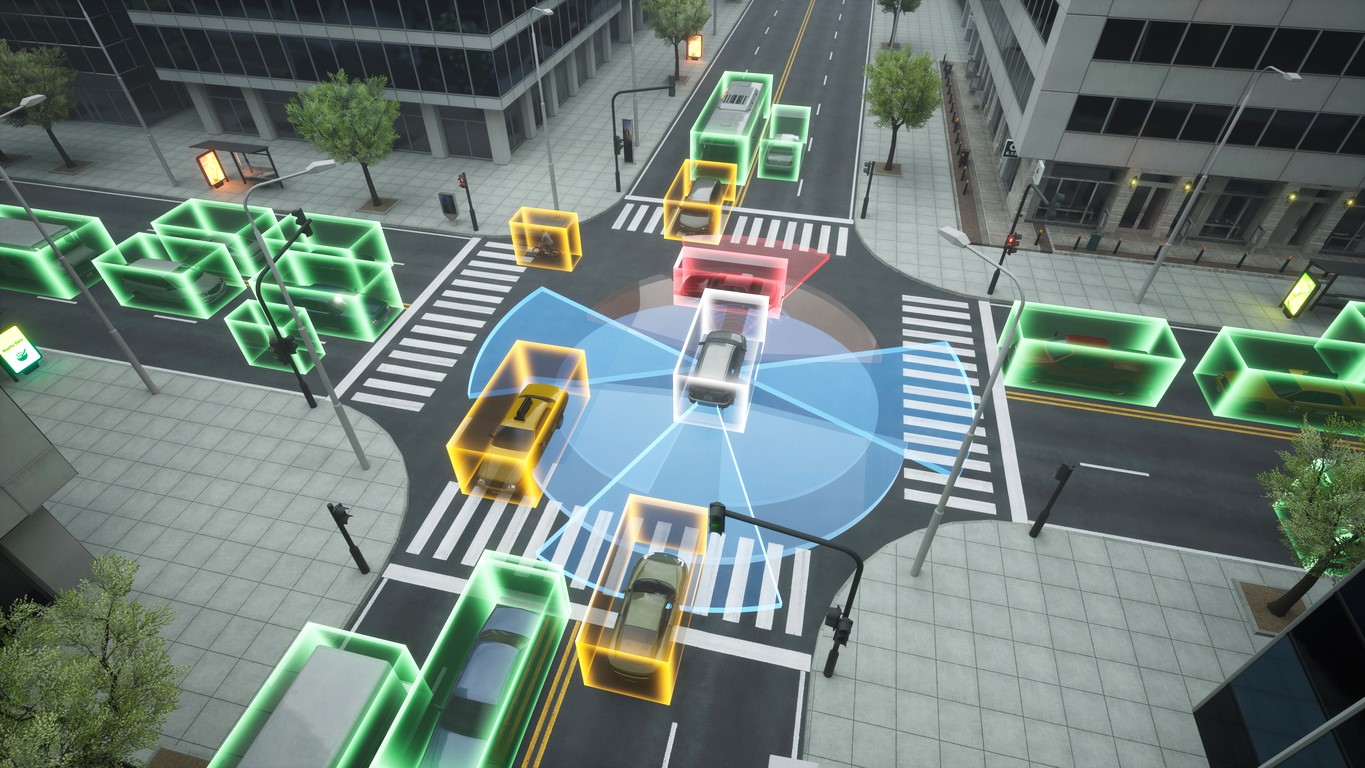
SLAMによって得られた環境地図を用いることで、自動運転車両は周囲の障害物を認識し、回避することもできるようになります。静的な障害物だけでなく、歩行者や他の車両などの動的な障害物も認識し、その動きを予測するようなことも可能です。
車両による周囲環境の把握と、安全、かつ効率的な経路計画および障害物回避は、自動運転を実現するための基盤となります。
自律制御システムでのSLAM活用
SLAMは自律制御システムにおいても重要な役割を果たしています。自己位置推定と環境地図作成を同時に行うことで、ロボットなどさまざまな自律移動体の効率的な運用を実現することが可能です。ここでは、自律制御システムにおけるSLAM活用について解説します。
自律型無人搬送車(AGV)での利用

自律型無人搬送車(AGV)へのSLAM技術導入は、AGVの自律性と柔軟性を大幅に向上させる中核的な要素として注目されています。
ガイドラインとなる磁気テープの床面工事やQRコードなどが不要となり、初期導入コストや設置時間が削減され、既存の環境にスムーズに導入することが可能です。
また、倉庫のような頻繁に変化する環境にも即座に対応し、ルートを自由に設定・変更できるため、運用の柔軟性が向上します。さらに、障害物の自動回避や検知停止機能により、工場や倉庫内での物流作業のような人との共存、常に変化する作業環境、高効率化が求められる現場での導入効果が顕著です。
工場や物流現場での応用
AGV以外でも、SLAM技術による自律型ロボットは工場や物流現場で幅広く活用されています。例えば、倉庫内を自律的に移動して在庫確認や棚卸し作業を行うロボットや、部品を自律的にピッキングして供給し、製品の梱包や保管場所への移動、自動積み下ろしなどを行うパレットハンドリングロボットなどが挙げられます。
さまざまな自動化への活用により、生産プロセス全体の最適化が可能です。人手不足の解消や作業効率の向上が期待されています。
ドローンや移動型サービスロボットへの実装
SLAM技術はドローンや移動型サービスロボットにも実装されており、その活用範囲が広がっている状況です。ドローンの自律飛行においては、GPSのような全地球航法衛星システム(GNSS)が届きにく屋内や地下空間でも、高精度な自己位置推定と障害物回避によってさまざまな作業が行われています。また、LiDAR SLAMとVisual SLAMを組み合わせたシステムにより、都市部での安全な自律飛行や目視外飛行の実現が期待されています。
具体的にはアメリカのドローンメーカーSkydioが開発したSkydio2+では、GPSとSLAMを組み合わせた自己位置推定技術が実装されています。ビル内部や建設物で囲まれた環境でも自動飛行により効率的な点検業務が可能です。
屋内外をシームレスに移動できるサービスロボットの実現や、人とのインタラクションを行う移動型ロボットの自律走行も主な活用例として期待されているものです。ドローンの安全な運用や、より柔軟なサービスロボットの活用が可能となります。
SLAMの技術的課題と解決策
SLAMを有効活用し、社会実装するためには、さまざまな技術的課題を解決しなくてはなりません。ここでは、SLAMの技術的課題と解決策をご紹介します。
精度向上の取り組み
SLAMの精度向上には、センサー融合やアルゴリズムの改良が重要です。複数のセンサーデータを組み合わせることで、単一センサーの弱点を補完し、より正確な自己位置推定と地図作成が可能になります。
また、ループ閉じ込み検出や最適化手法の改良により、長距離や長時間の走行でも累積誤差を抑制することが可能です。さらに、深層学習を活用した特徴抽出や位置推定の手法も精度向上につながることが期待されます。
計算負荷の軽減
SLAMの実時間処理を実現するには、計算負荷の軽減が不可欠です。アルゴリズムの効率化や並列処理の活用、ハードウェアの最適化などが主な対策として挙げられます。
例えば、サブマップ戦略※を用いて大規模環境を分割処理することで、計算量を削減可能です。また、特徴点の選択的な処理や、エッジコンピューティングの活用により、リソースの効率的な利用が可能になります。
※サブマップ戦略:ロボットが移動中に周辺環境を小さなエリアごとに高精度な地図(サブマップ)として構築し、それらを逐次的につなぎ合わせて全体の地図を形成する手法
動的環境への対応
従来のSLAMは静的環境を前提としていましたが、実世界では動的物体が存在するため、これらに対応する技術が必要です。従来の静的環境を前提としたSLAMシステムを拡張し、動的な環境に対応するための技術として、Dynamic SLAMがあります。
その方向性は、オブジェクトレベルでの処理を行うObject-awareなシステム構築と、静的ランドマークと同時に移動体オブジェクトを最適化対象に含める2つです。動的物体の検出と追跡、セマンティックセグメンテーション※を用いた物体の分類、動的要素を除去または追跡する手法などが研究されています。
※セマンティックセグメンテーション:画像内の各ピクセルを意味のあるクラスに分類する画像処理技術
自動運転や自律制御の実現にはSLAMの活用が不可欠
SLAMは、自己位置推定と環境地図作成を同時に行う技術で、自動運転や自律制御システムの中核を担っています。カメラやLiDARなどのセンサーを活用し、未知の環境での正確な位置特定やリアルタイムマッピング、障害物回避を可能にするのが特徴です。
自動運転車、ドローン、無人搬送車など幅広い分野で活用される一方、精度向上や計算負荷の軽減、動的環境への対応といった技術課題の解決が進められています。
シリコンスタジオでは、ゲームエンジンによる仮想空間の構築で、SLAM技術の活用を支援しております。
ROSや各種シミュレーターと連携させたSLAMによる画像認識状況の可視化、アルゴリズムの検証などのシミュレーション環境を用意することができます。
是非、シリコンスタジオにご相談ください。
出典:J-STAGE「移動体の自己位置推定技術:SLAM」特集号 / SLAMの現状と今後の展望
出典:情報処理学会研究報告「SLAM実行時のエッジへの動的メモリオフロード制御の提案と設計」
出典:学 押久保雄平(中央大学)正 池勇勳(JAIST)Sarthak Pathak (中央大学)正 梅田和昇(中央大学)「Instance Segmentationを利用した屋内の動的環境における潜在的動物体に基づくSLAMの改善」

■著者プロフィール:シリコンスタジオ編集部
自社開発による数々のミドルウェアを有し、CGの黎明期から今日に至るまでCG関連事業に取り組み、技術力(Technology)、表現力(Art)、発想力(Ideas)の研鑽を積み重ねてきたスペシャリスト集団。これら3つの力を高い次元で融合させ、CGが持つ可能性を最大限に発揮させられることを強みとしている。

- SHARE





DXコラムは、デジタルツインやメタバース、AIをはじめ産業界においてトレンドとなっているDX関連を中心としたさまざまなテーマを取り上げることにより、デジタル技術で業務の効率化を図ろうとする方々にとって役立つ学びや気付き、ノウハウなどを提供するキュレーション(情報まとめ)サイトです。
Category
Ranking
- エンタメ・映像
- その他
2024.08.23
ポリゴンは3Dモデルの最小単位。構成や特徴を知っておこう

- インフラ・情報通信
2025.11.28
WebGPUの仕組みと最新動向 ― WebGLからの移行とDXへの応用

- その他
- 建築・土木
- 観光・文化・芸術
2024.10.16
フォトグラメトリとは?3Dモデルを作成できる技術について知ろう

- 建築・土木
2024.07.24
i-Construction 2.0とは?国土交通省が推進する「3つの柱」が課題解決に導く

- 自動車・モビリティ
- 製造・重工
- 農林水産
2024.10.25
AIによる画像認識とは?その仕組みと技術を解説